
We specialize in hard to find items

All Categories


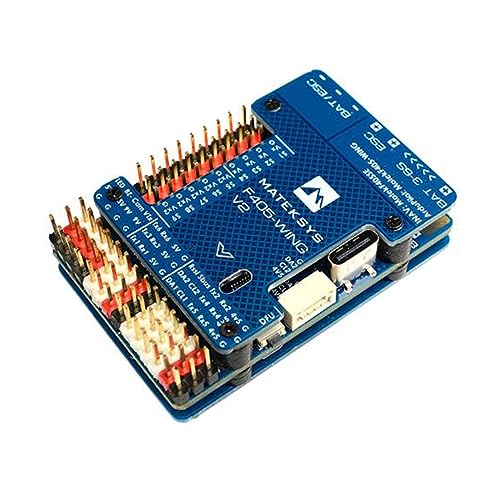




MATEK Mateksys F405 Wing V2 Flight Controller F4 FC New Layout ICM42688P DPS310 ArduPilot INAV for RC FPV Racing Drone Fixed-Wing……
Share Tweet
*Price and Stocks may change without prior notice
*Packaging of actual item may differ from photo shown
- Electrical items MAY be 110 volts.
- 7 Day Return Policy
- All products are genuine and original
- Cash On Delivery/Cash Upon Pickup Available








MATEK Mateksys F405 Wing V2 Flight Controller F4 FC Features
-
Updated version: Matek F405-WING V2 Flight Controller ,it is designed specially for fixed wing.
-
USB:Type-C; Baro:DPS310; Current sensor:100A continuous, 220A Peak; Current scale: INAV 150 ArduPilot BATT_AMP_PERVLT= 66.7.
-
INAV:MatekF405SE, 6.0 or newer;ArduPilot:MatekF405-Wing, 4.4 or newer.
-
MCU: STM32F405RGT6, 168MHz , 1MB Flash; IMU: ICM42688-P; Blackbox: MicroSD card slot.
-
6x UARTs; 2x I2C; 3x ADC; 1x Softserial_Tx option(INAV); 10x PWM outputs.
About MATEK Mateksys F405 Wing V2 Flight Controller F4 FC
FC Specifications MCU: 168MHz STM32F405 IMU: MPU6000 accelerometer/gyro (SPI) Baro: BMP280 (I2C) OSD: INAV OSD w/ AT7456E chip Blackbox: MicroSD card slot (SD/SDHC) VCP & 6x UARTs 2x Motors, 7x Servos outputsv 2x I2C 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red) Built in inverter for SBUS input (UART2-RX) PPM/UART Shared: UART2-RX SoftSerial on TX2 pad Battery Voltage Sensor: 1:10 (Scale 1100) WS2812 Led Strip : Yes Beeper : Yes RSSI: Yesv FC Firmware INAV Flight Target: MATEKF405SE PDB Input voltage range: 9~30V (3~6S LiPo) w/TVS protectionv 2x ESC power pads Current Senor: 104A, 3.3V ADC, Scale 317 BEC 5V output Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed Continuous current: 2 Amps, Max.3A BEC 9V /12V output Designed for Video Transmitter, Camera, Gimbal ect. Continuous current: 2 Amps, Max.3A 12V option with Jumper pad BEC Vx output Designed for Servos Voltage adjustable, 5V Default, 6V or 7.2V via jumper Continuous current: 5 Amps, Max.6A Output Ripple: 50mV (VIn=24V, VOut=5V@5A load) BEC 3.3V output Designed for Baro / Compass module and Spektrum RX Linear Regulator Continuous current: 500mA Physical Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm Dimensions: 56 x 36 x 13 mm Weight: 25g
















